Mit ATRO stellt Beckhoff ein neues Konzept für Robotik-Applikationen vor. Dabei handelt es sich um einen modularen Baukasten, aus dem sich äußerst flexibel für jede
Weiterlesen
Mit ATRO stellt Beckhoff ein neues Konzept für Robotik-Applikationen vor. Dabei handelt es sich um einen modularen Baukasten, aus dem sich äußerst flexibel für jede
Weiterlesen
Seit 1986 – also bereits seit 35 Jahren – gibt es die PCbasierte Steuerungstechnik von Beckhoff und seit 1996 – schon ein Viertel Jahrhundert –
Weiterlesen
Die Elektrozylinder der Serie AA3000 eignen sich optimal als Direktantrieb für lineare Applikationen mit hohen Prozesskräften und -geschwindigkeiten. Dabei treffen die Vorteile hinsichtlich Kraft, Dynamik
Weiterlesen
Die Embedded-PCs der Serie CX5600 sind mit AMD-Ryzen™- Prozessoren ausgestattet und ergänzen die bestehenden CX51xxund CX52xx-Geräte bei identischen Gehäuseabmessungen. Zusätzlich bieten die neuen Geräte die
Weiterlesen
Der TwinCAT/BSD Hypervisor ist ein Systemfeature des Betriebssystems TwinCAT/BSD von Beckhoff und ermöglicht die gleichzeitige Ausführung von virtuellen Maschinen (VMs) und TwinCAT-Echtzeit-Anwendungen auf einem Industrie-PC.
Weiterlesen
Mit TwinCAT Machine Learning Server als weiterer Inference Engine wird TwinCAT Machine Learning auch den zunehmend steigenden Anforderungen des maschinellen Lernens (ML) bzw. Deep Learning
Weiterlesen
Die EtherCAT-Messtechnikklemme ELM3002-0205 ist für HochvoltSpannungsmessungen an Batterien, Generatoren und Motoren ausgelegt. Sie unterstützt die vier Messbereiche ±60, ±120, ±500 bzw. ±1.000 V und eignet
Weiterlesen
Der neue Schaltschrank-Industrie-PC C6675 mit ATX-Motherboard sowie dem Gehäuse und Netzteil des Industrie-Servers C6670 ermöglicht nun auch den Einsatz großer, leistungsstarker Grafikkarten für besonders anspruchsvolle
Weiterlesen
Die 2-kanalige EtherCAT-Klemme EL7062 ist für den direkten Anschluss von zwei Schrittmotoren im mittleren Leistungsbereich bis 3 A und für einen Spannungsbereich von 8 bis
Weiterlesen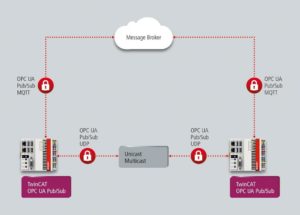
Mit der Integration von OPC UA Pub/Sub direkt in die TwinCAT-3-Runtime lassen sich auf einfache Art und Weise Machine-toMachine- (M2M) und Device-to-Cloud (D2C)-Szenarien basierend auf
Weiterlesen