Um solch ein Szenario bei der Automatisierung zu verhindern, muss lediglich der Fokus der Auslegungsparameter weitläufiger gesetzt werden. Da die meisten Investitionskosten, wie beispielsweise der Industrieroboter selbst, die notwendige Sicherheitslinie für ein sicheres und gefahrenloses Betreiben des Roboters sowie auch die Wertschöpfung selbst, z.B. in Form einer CNC Bearbeitungsmaschine, nur bedingt mit einem speziellen Bauteil in Zusammenhang gebracht werden können, entsteht auch mit einem globalen Ansatz kein höheres Investitionsvolumen.
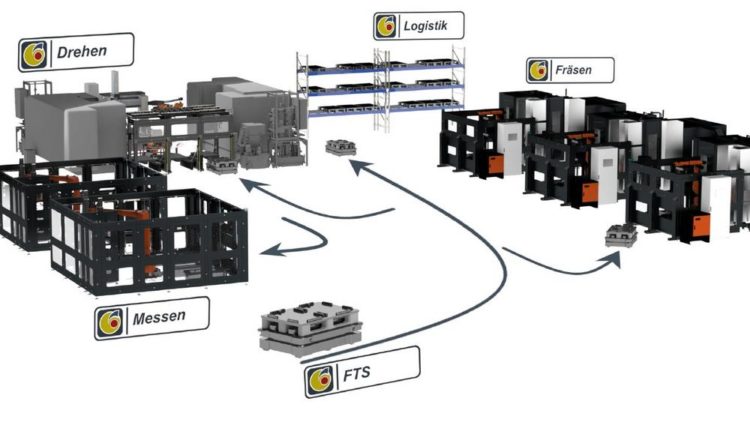
Eine globale Definition der Anforderungen berücksichtigt alle bestehenden, zukünftigen und noch unbekannten Bauteile für den zu automatisierenden Prozess. Maximale Bauteilabmessungen können beispielweise aus dem möglichen Bearbeitungsbereich und der Traglast des CNC Bearbeitungsprozesses übernommen und somit die nötige Traglast des Roboters für alle möglichen Bauteile definiert werden. Das Zuführsystem bzw. der Bauteiltransport kann global auf alle vorgehenden und nachträglich verbundenen Prozesse übertragen werden. Es ist somit ein logisch dimensioniertes Gebinde zu definieren, das alle verbundenen Bearbeitungsprozesse in der Herstellungskette berücksichtigt. Hierbei kann auch die Logistik und die Lagerung der Bauteile herangezogen werden und z.B. auf eine Palette als Gebinde für die Automatisierung definiert werden. Bei der Definition des Gebindes ist in erster Linie relevant, dass die komplette Wertschöpfungskette abgebildet werden kann, auch, wenn diese aktuell noch manuell umgesetzt ist. Aus diesen globalen und strategischen Überlegungen heraus sind die Anforderungen an die Matrix-Zelle zu definieren und es wird gewährleistet, dass auch Änderungen oder umstrukturierte Prozesse keine Auswirkung auf das grundlegende Design der Roboter-Zelle haben.
Die bauteilspezifischen Komponenten der Automatisierung, wie beispielsweise der Bauteilgreifer des Roboters, sind mit vergleichsmäßig geringeren Investitionen zu bewerten. Somit haben alle Komponenten, die mit einem Produktlebenszyklus eines Bauteils in Verbindung stehen, keine Auswirkung auf die weitere Verwendung der Matrix-Zelle, da diese prozessspezifisch und nicht bauteilspezifisch ausgelegt ist. Die zukunftsorientierte Auslegung der Matrix-Zelle ist der erste Schritt im Wandel von einem konventionell fertigenden Unternehmen hin zu einer hochflexiblen Smart Factory und erfordert lediglich eine neue, zukunftsträchtige Definition bei der Implementierung von Roboter-Zellen in der eignen Fertigung.
Die Firma Stecher GmbH wurde im Jahr 1964 gegründet. Innerhalb des letzten Jahrzehnts haben wir uns vom kleinen Metall Verarbeiter zum modernen Mittelständler mit mehr als 200 Beschäftigen entwickelt. Auch in den nächsten Jahren wird Stecher kräftig wachsen und sich weiteres wichtiges "Know-how" erarbeiten.
Ein wichtiger Teil dieser Entwicklung ist die Automatisierung von Fertigungs-, Prüf- und Messvorgängen. So wurde im Jahr 2014 die Abteilung S-TEC (Stecher-Technik) gegründet. Die nach dem Leitgedanken "Automatisierung von Drehern für Dreher" aufgebaut wurde. In den Nächsten Jahren wurden in der S-TEC eigene Fertigungslinien, Roboterlösungen und Kleinst-Automationen entwickelt, geplant und realisiert. So entstanden durch das Verbinden von hoher Fertigungskompetenz und kreativer Automatisierung unglaublich produktive und wirtschaftliche Lösungen.
Mit diesem gesammelten Wissen wurde zum 01.01.2019 die Firma Stecher Automation GmbH, als eigenständige Tochtergesellschaft, gegründet um dem industriellen Mittelstand den Weg zur Smart Factory zu ermöglichen.
Stecher-Automation GmbH
Nellenburgstraße 1
88605 Sauldorf-Krumbach
Telefon: +49 (7777) 93010
Telefax: +49 (7777) 9301-705
http://www.stecher-automation.de
![]()